
UAS / UAV Photography for 3D Scanning, Measurement and Modeling
With the proliferation of UAS/UAV
The technique is called photogrammetry. You no longer need to hire an airplane to take aerial photos or purchase expensive aerial photos of your site for your photogrammetric project. A scene can be shot with a UAS at various heights, with more flexibility, less risk, and significantly reduced cost than a piloted aircraft. UAS-based photogrammetry is great for larger landscapes, and objects that are difficult to capture from the ground.

PhotoModeler is a software tool for converting photographs into accurate and useful 3D data. Accessible UAS camera platforms have opened up opportunities for PhotoModeler in mining/geo-technical, stockpile, surveying and related fields. The PhotoModeler technique used in many of these UAS projects is called SmartMatch/DSM.
Getting aerial photos of a site or scene has never been easier. A large scene can be quickly photographed, the photos can be brought into PhotoModeler and in short order the photos are oriented, generating an impressive dense surface 3D model. While PhotoModeler is not a traditional aerial-photogrammetry package (as typically used in topographic mapping from specialized aerial mapping cameras), it is very capable in handling low-flying UAS photography from modern digital cameras.
This article shows a real world example including the steps for creating accurate 3D Dense Surface Models (DSM) and the steps for measuring a volume from photos taken by a camera mounted on a UAS.
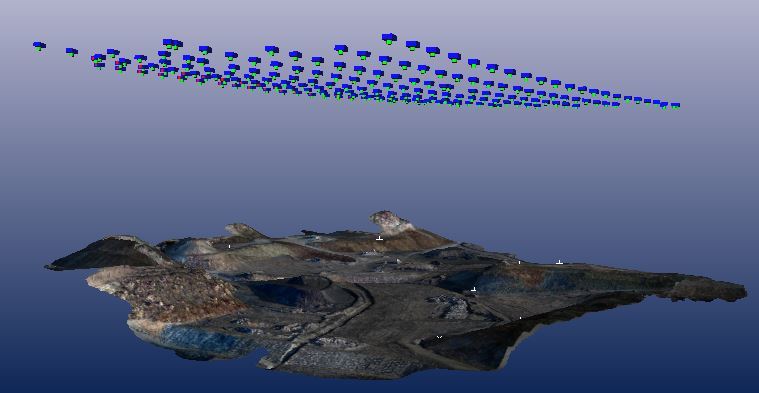
The example project we showcase here is a coal stockpile. The project consists of 189 photos taken in 9 flight lines:
This UAS has an integrated 5 mega-pixel camera. The camera was calibrated in PhotoModeler first using the multi-sheet method (see calibration tutorials), and then Field Calibrated by PhotoModeler to fine tune it to account for the longer focus distance of the aerial photos.
Scene
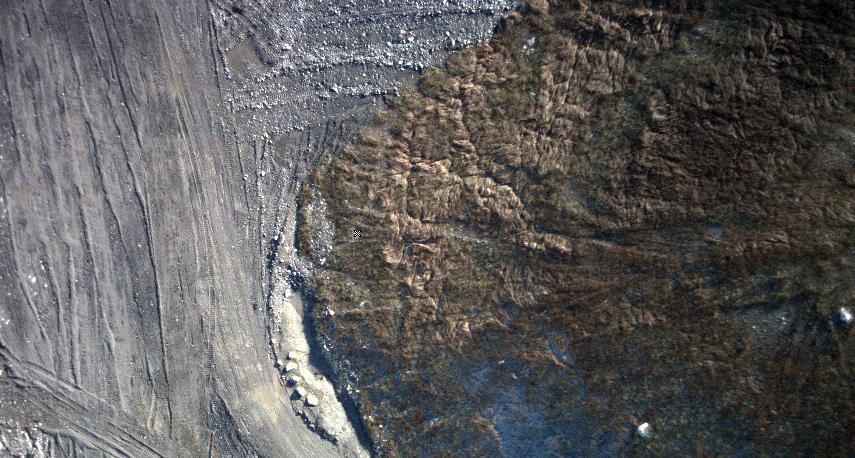
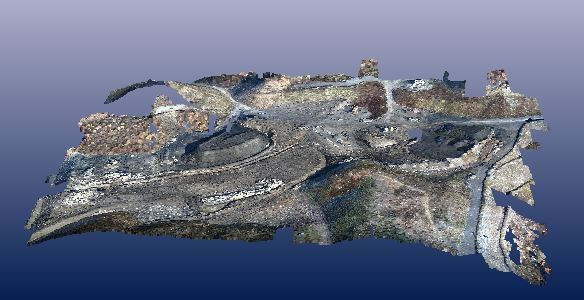
The site is approximately 60 acres (about 1400ft by 1900ft) or 24 hectares (425m x 575m). The subject matter is ideal for DSM, with a strong random natural ‘texture’ throughout the scene. Here’s a sample image:
Photography
The 189 photos were taken in 9 passes in a uniform grid pattern.
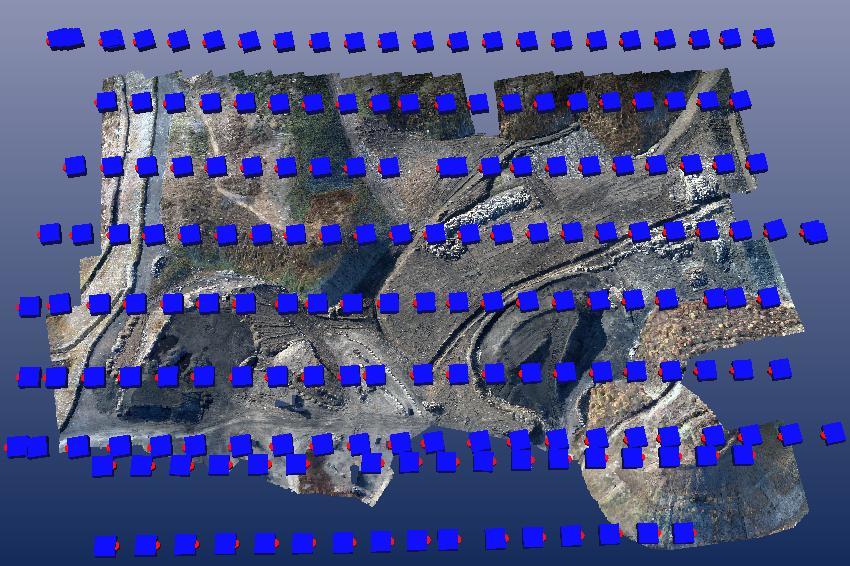
PhotoModeler uses automated matching and this type of photo overlap helps reduce mismatches, strengthens good matches, reduces noise and helps ensure a well-defined result.
The camera positioning or frequency of image capture will depend on the speed of the aircraft and distance to surface. The following chart shows the base to height ratio for the photo pairs, quantifying the overlap:
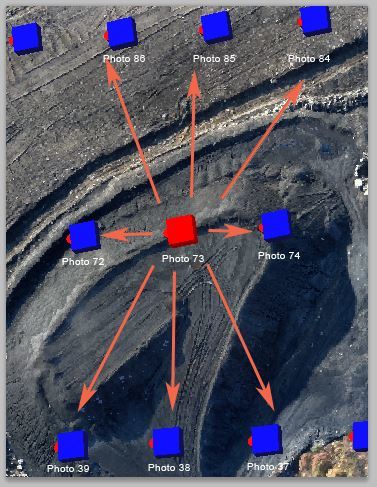
| Photo Pairs | Base:Height Ratio |
| 73-74 | 0.13 |
| 73-72 | 0.13 |
| 73-86 | 0.36 |
| 73-85 | 0.3 |
| 73-84 | 0.28 |
| 73-39 | 0.32 |
| 73-38 | 0.3 |
| 73-37 | 0.32 |
The Base:Height ratio is a measure of overlap and geometric strength, where the “Base” is the distance between camera positions, and the “Height” is the average distance to the surface. The amount of image overlap is affected by the camera specifications as well – format size and focal length.
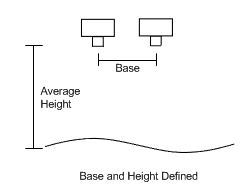
It is generally recommended that photos be taken with a Base:Height ratio of less than 0.5 to ensure adequate overlap and a strong geometry for matching and orientation. In this example the ratios are low, meaning a good geometry and ample overlap between multiple pairs for the given focal length.
The images are also very crisp, which helps with feature detection and matching. If the UAS was flying too fast, especially if using video with frame extraction, there would be a greater risk of motion blur. Blur can cause noise in the model as image features are less distinct and feature matching errors are more likely to occur.
Another consideration is the image resolution relative to the altitude. The trade-off is that at a higher altitude more of the scene can be captured in fewer photos but with lower effective ground resolution. Taking photos from a lower altitude will have a higher effective ground resolution and usually allows for a more detailed model, but this also means that more photos will be required to cover the scene – increasing the processing time. There is no single formula applicable to all projects since it will depend on the camera resolution, the model object/scene composition, the UAS speed, altitude, and the accuracy/detail goals for the project. Some experimentation may be required in order to determine the best configuration for various hardware setups and landscapes.
In the example project, 5 megapixel photos were taken at an altitude of approximately 640ft/200m, with photos being taken approximately every 85ft/25m in a flight line.
Modeling & Processing
After the photography, the modeling and processing takes place in the PhotoModeler software on a Windows PC. The stages of processing are SmartMatch, Orientation, DSM, Triangulation and Measurement. These stages can be run independently, or for ease of use, a wizard will run all stages together (except for measurement) and you can return to your PC with a completed project.
SmartMatch & Orientation
The 189 photos were brought into PhotoModeler and SmartMatch was run successfully, orienting all photos. The blue shapes are the camera positions (the green shows the lens position pointing to the ground):

DSM
DSM (using the Multi-View Stereo, or MVS algorithm) was run with default settings and it created a point cloud of close to 2 million points. The point cloud was very clean and good detail was picked up:
(2 million points from PhotoModeler DSM with color extracted for each point from photos)
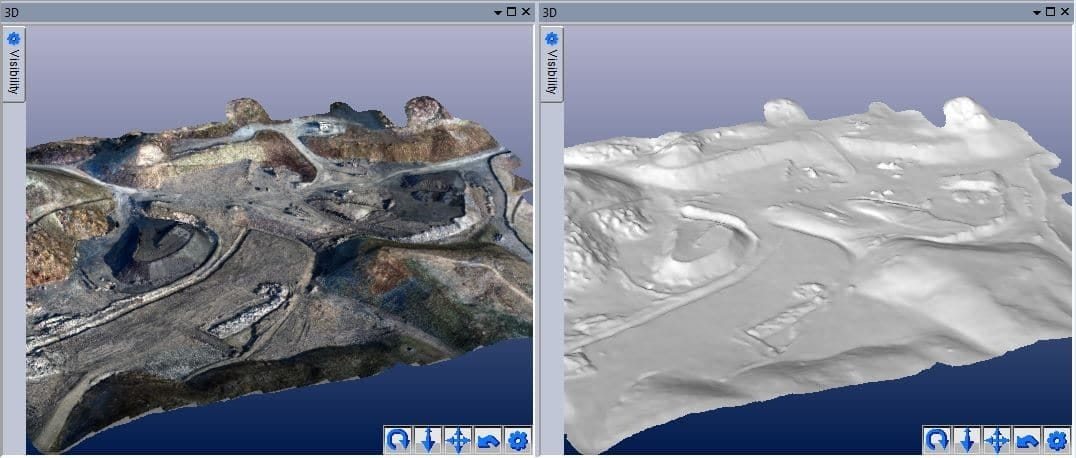
Triangulation
Triangulation and decimation was run and they generated a mesh of approximately 240,000 triangles:
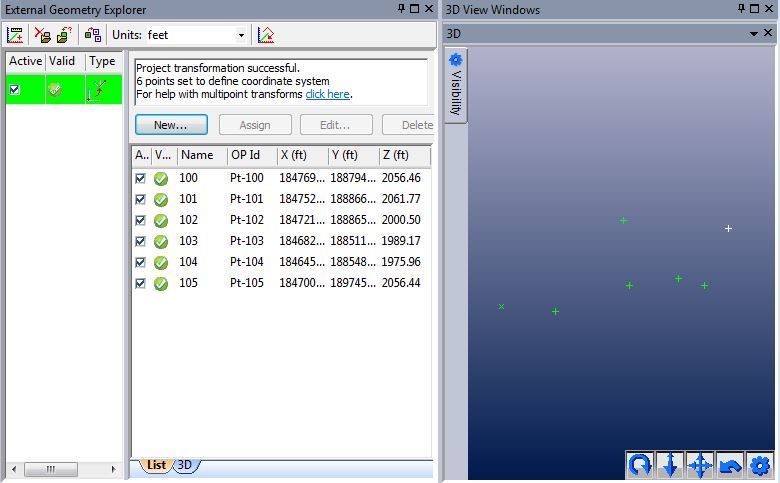
Setting up the Coordinate System
To tie the photogrammetry project to the real-world, a coordinate system and scale was defined. In this project seven points with known 3D positions were imported into PhotoModeler and were marked and referenced throughout the scene. A multi-point transform was created with these points to scale and orient the model in a real world coordinate system using a best-fit:
Measurement
In the sample project there were a number of stockpiles requiring volume measurement. The entire site was modeled as a single PointMesh, so the full PointMesh was split into smaller measurement components using PointMesh Edit Mode. See the PointMesh Edit mode tutorial.
The isolated PointMesh is selected with the Measurements pane showing the volume:
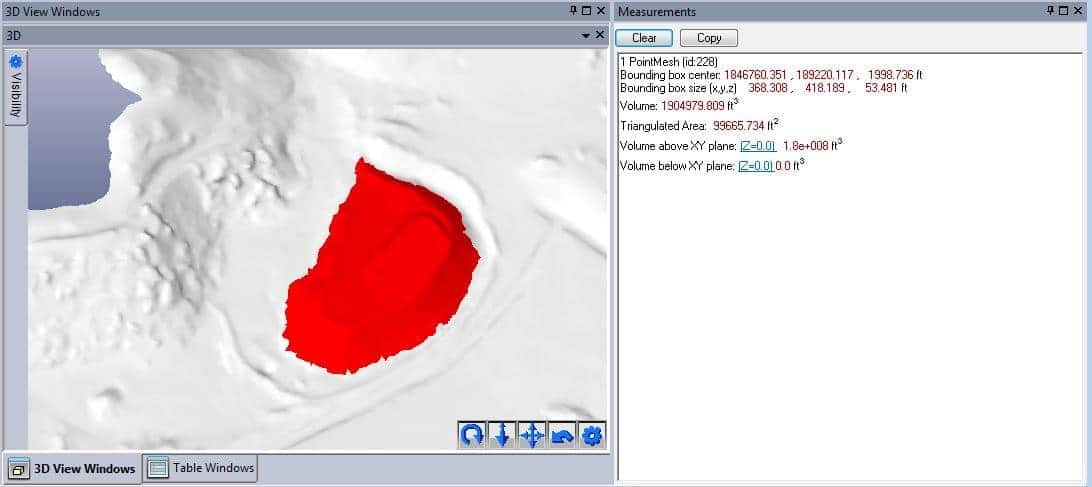
The volume of this component came out to a little under 2,000,000 cubic feet. The volume measurement is based on a ‘sealed’ shape, where PhotoModeler completes the bottom of the surface using an approximate triangulation to make the surface solid/watertight. This volume measurement is approximate, and so a standard surveying technique to define a datum (in this case a plane) under the stockpile is preferred.
The “Volume above XY plane” metric could be used but the Z=0 plane is far below the stockpile which has a base at elevation of 1982 feet above sea level. We could use a plane offset (of 1982 feet) but a more reliable method is to create a plane fit to the ground points around the stockpile.
A new Plane surface was created at the base of the stockpile, and the volume between the surface and the new plane was computed. This was done by defining a plane based on several SmartPoints around the base of the surface. The 3D Viewer at left below shows the SmartPoint cloud and the triangulated mesh surface. Several SmartPoints around the base of the surface were selected and a Plane defined (Marking menu, Surface Tools, Create best fit plane from selected objects), which is shown in the right 3D Viewer:

Now, when the surface and the plane are both selected, the Measurement Pane shows a volume between the two surfaces, providing the volume measurement of the stockpile above the surface of 1.922 million cubic feet:

Conclusion
UAS and drone photography is more important today than ever. PhotoModeler is a great platform for getting accurate measurements, scans and models from this type of photography. The article demonstrated a case of using photos from a UAS to quickly capture a large scene and to model accurate volume of a stockpile using PhotoModeler Scanner. With the help of a UAS with mounted camera and PhotoModeler, a complex measurement task can be greatly simplified, done quickly, and is very cost effective.
Watch the Youtube video for an overview of using a UAS for stockpile volume measurements with PhotoModeler: