
PhotoModeler’s New Point Cloud Meshing Capabilities
A number of improvements were made to the meshing capabilities in PhotoModeler Scanner version 2013.0.1 (April 22, 2013). Meshing is a key component in Scanner when working with point clouds created by DSM or by importing (such as from a laser scanner).
The meshing steps have been redesigned to streamline the process of creating a triangulated mesh from point clouds. The biggest change, compared to previous versions, is the use of a state-of-the-art surface reconstruction algorithm to provide a sharp triangulation resulting in a contiguous surface which does not suffer from holes in the mesh. Moreover, two additional noise filters have been added to deal with noisy point clouds. The end-user can expect to see better quality meshes as compared to the previous version. Extremely large point clouds are also triangulated faster than previous versions.
Improved triangulations with fewer holes
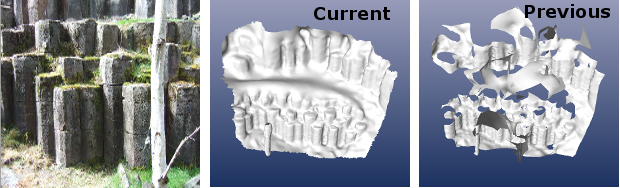
In the figure below, we show an example of a project in which the new triangulation is much improved. A photo of the scene is also shown to put the mesh in perspective.
Controlling sharpness and triangle counts
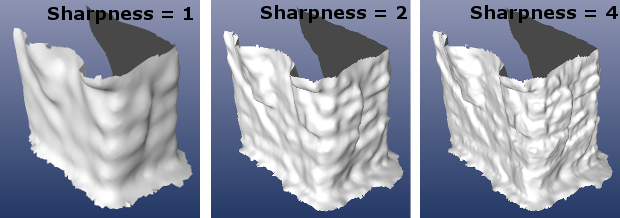
The new triangulation step has a single parameter which controls the sharpness and detail of the resulting mesh. A lower sharpness setting results in a smoothed surface which captures larger details but neglects fine details. This setting outputs a small number of triangles and can be performed very quickly. A higher sharpness setting results in a sharp surface which captures both coarse and fine details. In the figure below, we show the results of changing the sharpness value on the resulting mesh. The subsequent table shows the triangle count and time taken to perform the reconstruction at each sharpness level. The size of the input point cloud is 26,483 3D points.
|
Sharpness Level |
Number of Output Triangles |
Reconstruction Time |
|
1 |
6,629 |
1 second |
|
2 |
26,444 |
3 seconds |
|
3 |
78,425 |
10 seconds |
|
4 |
83,342 |
10 seconds |
Mesh Bounds
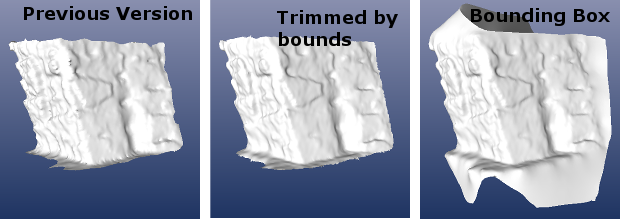
Due to the nature of the reconstruction algorithm, the triangulated mesh may extend beyond the bounds of the original input point cloud. This behavior is a result of the algorithm attempting to provide a closed and spatially contiguous surface. The default settings ensure that only triangles within the bounding box of the original input point cloud are output. However, PhotoModeler can trim the triangulation more closely by using the “Trim Mesh By Bounds” option. In the figure below, we show a comparison of the triangulated mesh in previous PM versions and the current results illustrating the trimming.
Noise Filters
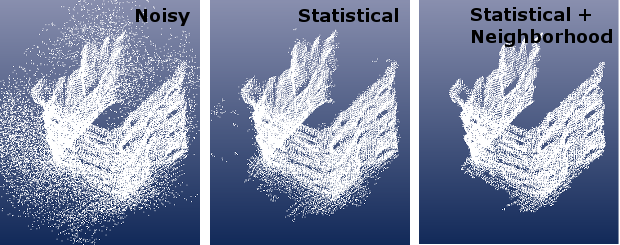
PhotoModeler has been augmented with a number of useful noise filters which can help provide a clean point cloud. The statistical outlier filter can remove both redundant as well as outlier points. The neighborhood filter can be used in addition to the isolated cluster filter for fine tuning outlier removal. In the figure below, we show a noisy point cloud which is subsequently cleaned using a combination of the statistical outlier filter and the neighborhood filter.
Efficiency
The number of default meshing steps has been reduced in the new version. As a consequence, the end user will experience a significant improvement in speed of meshing as compared to earlier versions, especially with large point clouds. For example, a project containing a point cloud of approximately 700k points outputs a triangulated mesh of 500k triangles in one minute using the new version. The same point cloud in the previous version of PhotoModeler outputs a larger mesh with 1.4 million triangles in 2:07 minutes. Although there is an increased number of triangles in the latter, the reconstruction quality is similar, if not better in the newer version. The timing test was conducted on a Quad-Core i7 processor clocked at 2.93 Ghz with 12GB of RAM running in a 64-bit instance of Windows 8. For smaller point clouds, less than 100k points, the the reconstruction time is similar.